Hello,
I have a problem with NAV2 and isaac sim. I followed the tutorials and wanted to use it on my own robot in isaac sim. I have a good tf tree but it keeps saying this: [slam_toolbox]: Failed to compute odom pose.
What can be the reason for that?
Thank you
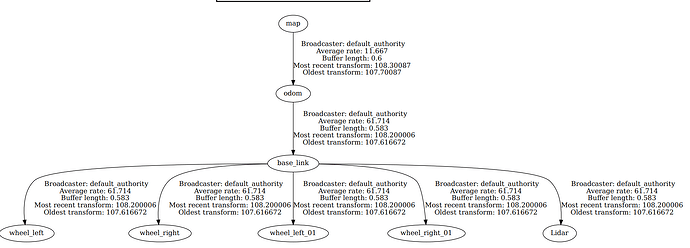
In slam_toolbox it is using the TF between the base_link and odom to compute the odom pose. Could you please do ros2 run tf2_ros tf2_echo odom base_link and see if any TF is being published?
In function getOdomPose, you can try to print out the error message from tf2::TransformException e and see what is the error by adding std::cerr << "Transform Exception: " << e.what() << std::endl;
1 Like
Thank you for your response.
I checked the TF between base_link and odom and it is being published. I also added Qos profiles but that didn’t change anything. You have some more tips?
I am using this command to run the slam_toolbox: ros2 launch slam_toolbox online_async_launch.py params_file:=mapper_params_online_async.yaml use_sim_time:=true
I fixed it. When you use the command ros2 launch slam_toolbox online_async_launch.py params_file:=mapper_params_online_async.yaml use_sim_time:=true it ignores the parameters so it falls back on its default params and in that file the base_frame is not base_link. Even if you than set the param to, in my case, base_link with ros2 set param ....it doesn’t work. You really need to change these values in the default file. Or make your own launch file.
system
Closed
6
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.